Для уравновешивания моста две его составляющие должны быть регулируемыми, чтобы обеспечить
уравновешивание как по модулю, так и по фазе. Неизвестная катушка имеет
собственную индуктивность LX,
взаимную индуктивность MX и
сопротивление RX. На рис. 4.6
представлены схемы мостов для измерения индуктивности методом сравнения с
известной индуктивностью либо известной емкостью.
а) б) в)
г) д)
Рис. 4.6.
Измерение
индуктивности LX с помощью моста
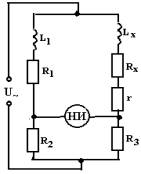
показанного на схеме 4.6,а состоит в сравнении с известной индуктивностью L1. При
уравновешивании моста можно регулировать R1 и L1 для достижения с RX и LX. Так как индуктивности имеют относительно большие
собственные сопротивления, можно включить в схему резистор r и
изменять его сопротивление в процессе уравновешивания, чтобы расширить диапазон
измеряемых индуктивностей. При
равновесии моста и определяются выражениями
![]() ,
, ![]() . (4.12)
. (4.12)
Такой измеритель индуктивности
используется сравнительно редко из-за трудности получения стабильных и точных
образцовых индуктивностей.
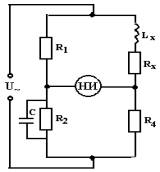
В схеме моста, представленной на
рис.4.6,б, его уравновешивание осуществляется с помощью резистора R2 и конденсатора C, при этом обеспечивается независимое уравновешивание LX и LX.
Условия равновесия моста описываются выражениями
![]() ,
, ![]() . (4.13)
. (4.13)
Индуктивность измеряется с помощью
емкостей высокого качества, которые значительно точнее и легче в изготовлении,
чем образцовые индуктивности, и создают незначительное поле.
В мостах часто не указывается RX, а вместо этого дается значение добротности QX, которое определяется по формуле
![]() . (4.14)
. (4.14)
Рассмотренный мост широко используется
для измерения индуктивности катушек с добротностью Q ниже 10. Этот верхний предел добротности обусловлен
тем, что при больших значениях Q резистор R2 должен
иметь слишком большое сопротивление.
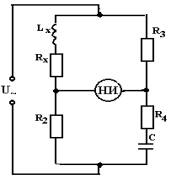
Для измерения индуктивности с высокой
добротностью (Q > 10) может использоваться
мост, схема которого показана на рис. 4.6,в. Условия равновесия данного моста
определяются выражениями
![]() ,
, ![]() ,
, ![]() . (4.15)
. (4.15)
Недостатком
этого моста является то, что его равновесие зависит от частоты, но при Q > 10 в выражении для LX членом с ![]() можно пренебречь. В
этом случае значение индуктивности не зависит от частоты и погрешность
измерений составит менее 1%.
можно пренебречь. В
этом случае значение индуктивности не зависит от частоты и погрешность
измерений составит менее 1%.
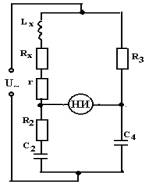
Для определения дифференциальной
индуктивности используется мост, схема которого показана на рис. 4.6,г. При
регулировке R2 и C2 можно обеспечить независимое равновесие для RX и LX.
Условия равновесия моста имеют вид
![]() ,
, ![]() (4.16)
(4.16)
Сопротивление r
применяют для расширения диапазона
возможного баланса сопротивлений.
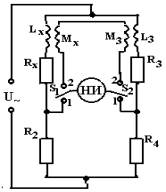
Для измерения коэффициенты взаимной
индуктивности катушки сравнением ее с образцовой используется мост показанный
на рис. 4.6,д. Измерение осуществляется следующим образом: сначала переключатели
S1 и S2
устанавливаются в положение 2. Мост уравновешивается регулировкой L3 и R3. Затем
переключатели переводятся в положение 1, и
М1регулируют до установления равновесия с МХ.
Условия равновесия моста определяются выражениями
![]() ,
, ![]() ,
, ![]() . (4.17)
. (4.17)
Четырехплечие мосты с использованием в
их плечах конденсаторов постоянной емкости и переменных резисторов дает удобные
прямые отсчеты значений измеряемых индуктивностей L и коэффициентов добротностей Q катушек, но обладают плохой сходимостью при малых
значениях Q. Процесс уравновешивания
становится затруднительным при Q = 1. Хорошую
сходимость при измерениях значений коэффициента добротности катушек имеют шестиплечие мосты.
Схема шестиплечего моста для измерения
индуктивности и добротности катушек приведена на рис. 4.7.
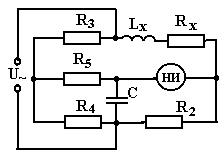
Рис. 4.7.
Из
общего условия равновесия моста получим:
 (4.18)
(4.18)
Хорошая сходимость моста объясняется независимостью второго условия
равновесия от сопротивления R5. Поэтому
равенство ![]() не нарушается при
дальнейшей регулировке моста резистором R5,
необходимой для выполнения первого условия равновесия.
не нарушается при
дальнейшей регулировке моста резистором R5,
необходимой для выполнения первого условия равновесия.