Следует отметить, что при уменьшении магнитной индукции показания магнитоэлектрического прибора уменьшаются, а при уменьшении удельного противодействующего момента показания увеличиваются. Таким образом, эти два фактора взаимно компенсируют друг друга.
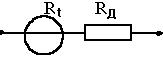
Рис. 3.7.
Для уменьшения температурной погрешности, обусловленной
изменением электрического сопротивления обмотки рамки и растяжек (или
пружинок), в магнитоэлектрических
приборах применяются различные схемные решения (рис. 3.7). Эту
погрешность можно уменьшить,
включая последовательно с температурно-зависимым сопротивлением Rt добавочное сопротивление RД из материала, электрическое
сопротивление которого практически
не зависит от температуры Результирующий температурный коэффициент такой
цепи
![]() , (3.9)
, (3.9)
где
αR – результирующий
температурный коэффициент сопротивления цепи; αR -
температурный коэффициент сопротивления материала рамки.
Из выражения (3.9) видно, что чем больше может быть
отношение RД/Rt,
тем меньше αR
и,
следовательно, тем меньше температурная погрешность γt. Для вольтметров на пределы измерения больше 3—5В
можно уменьшить γt до значений, соответствующих классу точности 0,2 и даже 0,1. Для
милливольтметров, к которым можно отнести и амперметры с шунтом, этот способ
компенсации неэффективен, прежде всего, потому, что связан с увеличением
собственного потребления, т. е. с уменьшением чувствительности прибора.
Для милливольтметров основными схемами температурной компенсации являются последовательно-параллельная схема (рис.3.8,а) и схема с термосопротивлением (рис. 3.8,б).

а) б)
Рис.3.8.
Электрическая цепь измерительного механизма состоит из
сопротивления обмотки R0 и последовательно с ним включенного сопротивления
упругих элементов (пружинок или растяжек) R1. Температурные
коэффициенты электрического сопротивления материалов обмотки и упругих элементов, как правило, различны.
При расчете сопротивление упругих элементов разбивают на две части:
«медную», имеющую температурный коэффициент такой же, как и материал обмотки, выполняемой
обычно из меди, и «манганиновую» - с
нулевым температурным коэффициентом. На схеме рис. 3.8 обозначены: R0 – сумма
сопротивлений обмотки и «медной» части упругих элементов (α0); R1 – сумма
«манганиновой» части сопротивления упругих элементов и добавочного сопротивления из манганина (α1 = 0);
R2 –
добавочное сопротивление из манганина
(α2 = 0); R3 – сопротивление шунта, выполняемого обычно из меди
или никеля (α3).
Температурная
погрешность находится как:
![]() , (3.10)
, (3.10)
где I0 – ток в
цепи ИМ при температуре градуировки t0; I0 t ток в цепи ИМ
при температуре t = t + θ;
![]() . (3.11)
. (3.11)
Вторая составляющая в выражении (2.10)
много меньше первой и ей можно пренебречь. В этом случае температурная
погрешность γt будет
равна нулю, если выполняется условие
![]() . (3.12)
. (3.12)
Из (3.12) следует, что условие, при котором
выполняется требование γt = 0, не содержит температуру перегрева θ, т. е.
справедливо для любого диапазона изменения температур. Такой вывод имеет место
в результате принятого допущения (исключением из рассмотрения зависимости
γt от составляющей, содержащей
θ2). Учет этой зависимости показывает, что в действительности
для заданного диапазона изменения температуры θ требование γt = 0 можно выполнить только для двух температур внутри
этого диапазона.
Рассмотренная схема обладает высокой стабильностью, технологичностью и позволяет обеспечить требуемую
температурную компенсацию для приборов самых высоких классов точности, имеет
большое собственное потребление. От этого недостатка свободна схема с
полупроводниковым терморезистором
(рис.3.8,б). Однако ввиду недостаточно высокой воспроизводимости
свойств и пониженной стабильности схемы с терморезисторами применяют только в
приборах классов точности 1,5; 2,5 и не выше чем класса 0,5. Применяют другие
схемы и методы термокомпенсации — мостовые схемы, термомагнитные шунты и т.
д.
© Copyright 2008, SLAiPS. All Rights Reserved. | SEO by freelancers.marketing