Основной частью электромагнитного прибора является электромагнитный ИМ. Принцип действия электромагнитного измерительного механизма основан на взаимодействии магнитного поля, создаваемого проводником с током, и ферромагнитного сердечника.
В настоящее время применяется большое число различных
типов электромагнитных приборов, которые различаются по назначению, конструкции
ИМ, форме катушек и сердечников и т. д.
В зависимости от инерционности подвижной части или
частоты ее собственных колебаний все электромагнитные приборы разделяются на
две группы: резонансные и нерезонансные. Резонансные работают только на
переменном токе. В нерезонансных
приборах момент инерции подвижной части значителен, и смещение подвижной части
пропорционально квадрату действующего значения тока.
Обе группы приборов делятся на две подгруппы:
поляризованные и неполяризованные. В поляризованных приборах кроме
намагничивающей катушки имеется постоянный магнит. Поляризованные
нерезонансные приборы не обладают высокой точностью. Из резонансных приборов в
основном применяются язычковые герцметры.
В зависимости от характера магнитной цепи
нерезонансные приборы разделяются на приборы с магнитопроводом, условно называемым
замкнутым, и без магнитопровода. Приборы с магнитопроводом имеют меньшее
собственное потребление мощности, но вместе с этим и значительные погрешности
из-за потерь в магнитопроводе от вихревых токов и гистерезиса. Приборы без магнитопровода имеют малое
собственное магнитное поле и большую зависимость показаний от влияния внешних
магнитных полей и позволяют создать
приборы высокой точности для работы на постоянном и переменном токе. Эти
приборы подразделяются на приборы отталкивающего и втяжного действия. В
приборах первого типа расположенные внутри катушки с током ферромагнитные
сердечники намагничиваются одноименно и отталкиваются друг от друга (рис.
3.9).
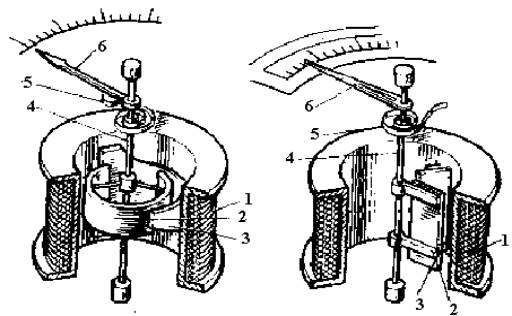
а) б)
1 – катушка; 2 – подвижный
сердечник; 1 – катушка; 2, 3 -
призматические
3 – неподвижный сердечник; 4
– ось; сердечники; 4 – ось;
5 – пружинка;
5 – пружинка; 6 -
стрелка
6 - стрелка
Рис. 3.9.
В приборах второго типа подвижный ферромагнитный
сердечник втягивается в магнитное поле катушки с током (рис. 3.10)
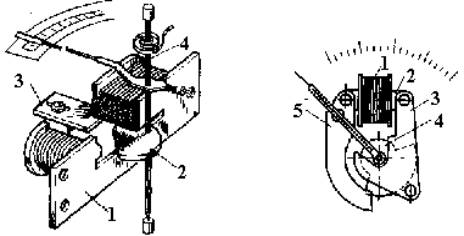
а) б)
1 – плоская катушка; 2 – сердечник; 1 – катушка; 2 – стержень;
3
– магнитный шунт; 4 – ось;
3, 5 – полюсные наконечники
4
– сердечник.
Рис. 3.10.
В настоящее время чаще других применяют электромагнитные измерительные механизмы с прямоугольными и круглыми намагничивающими катушками, призматическими и цилиндрическими сердечниками.
При прохождении тока J по намагничивающей катушке 1 в результате взаимодействия электромагнитного поля катушки и сердечника возникает вращающий момент МВР, который определяется по формуле
![]() , (3.13)
, (3.13)
где L –индуктивность катушки.
Противодействующий момент может создаваться как с помощью спиральных пружинок так и электрическим способом (в электромагнитных логометрах), а успокоение подвижной части механизма осуществляется воздушным или магнитоиндукционным успокоителем.
При создании противодействующего момента с помощью пружинок получим уравнение преобразования электромагнитного прибора
![]() . (3.14)
. (3.14)
Из выражения (3.14) следует, что угол отклонения подвижной части электромагнитного механизма не зависит от направления тока, и эти ИМ могут использоваться в цепях постоянного и переменного тока. В цепи переменного тока они измеряют действующее значение тока (или напряжения).
Электромагнитный логометр содержит две катушки и два ферромагнитных сердечника, укрепленных на одной оси. Конструкция выполнена так, что при протекании токов J1 и J2 по катушкам движение одного из сердечников увеличивает индуктивность соответствующей катушки, а второго – уменьшает. Это приводит к тому, что вращающие моменты будут направлены в противоположные стороны, т. е. один момент будет вращающим, а второй – противодействующим. Уравнение преобразования электромагнитного логометрического измерительного механизма можно записать как:
 . (3.15)
. (3.15)
© Copyright 2008, SLAiPS. All Rights Reserved. | SEO by freelancers.marketing