Температурная погрешность gt возникает вследствие изменения сопротивления обмоток рамок (катушек) и изменения упругих свойств растяжек или пружинок при изменении температуры. Для компенсации температурной погрешности применяют специальные схемы. На рис. 3.17 приведена последовательно-параллельная схема компенсации температурной погрешности, которая позволяет снизить температурную погрешность многопредельного электродинамического ваттметра до gt £ 0,1 %.
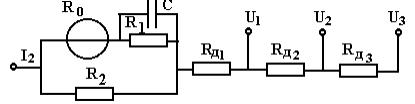
Рис. 3.17.
ъ
Все сопротивления, кроме R0, выполнены из манганина (αR = 0).
![]() , (3.31)
, (3.31)
где RДi – добавочное сопротивление на данном пределе измерения;
![]() ;
; ![]() .
.
Частотная погрешность обусловлена зависимостью полного сопротивления катушек от частоты, изменением фазовых соотношений электродинамического прибора (угловая погрешность), взаимной индуктивностью катушек. Погрешность от изменения сопротивления мала, и ей можно пренебречь. Для уменьшения угловой погрешности в параллельную цепь последовательно с обмоткой рамки может быть включен конденсатор (рис. 3.17) С @ L0 /R1 (L0 и R1 – индуктивность и сопротивление подвижной катушки). Погрешность от взаимной индуктивности может быть уменьшена при компенсации угловой погрешности.
Кроме рассмотренных температурной и частотной погрешностей,
электродинамическим приборам присущи
также погрешности от влияния внешнего магнитного поля и электростатического
взаимодействия. Для их компенсации применяют методы магнитной защиты и
электростатическое экранирование.
© Copyright 2008, SLAiPS. All Rights Reserved. | SEO by freelancers.marketing